 Researchers have demonstrated that the vine robot can safely and stably lift a variety of heavy and fragile objects, including watermelons. Image credit: Provided by researcher
Researchers have demonstrated that the vine robot can safely and stably lift a variety of heavy and fragile objects, including watermelons. Image credit: Provided by researcher
Written by Jennifer Chu
In the world of horticulture, some vines are particularly prone to snags. As it grows, the tree’s vines can wrap around obstacles and exert enough force to topple fences and entire trees.
Inspired by the sinuous tenacity of vines, engineers at MIT and Stanford University have developed a robotic gripper that can snake around and pick up a variety of objects, including glass vases and watermelons. This provides a gentler approach compared to traditional gripper designs. Larger versions of the robot tentacles can also safely lift humans out of bed.
The new bot consists of a pressurized box placed near the target object, from which long vine-like tubes inflate and grow like an inside-out sock. As it stretches, the vine twists around the object and continues back towards the box. There it automatically clamps into place and mechanically unwinds, gently lifting the object with a soft sling-like grip.
Researchers have demonstrated that the vine robot can safely and stably lift a variety of heavy and fragile objects. The robot can also maneuver through tight spaces and through clutter to reach and grab desired objects.
The research team envisions that this type of robotic gripper could be used in a wide range of scenarios, from harvesting crops to loading and unloading heavy loads. In the short term, the group is considering applications in elderly care settings, where soft inflatable robotic tendrils could help gently lift people out of bed.
“Moving someone out of bed is one of the most physically demanding tasks a caregiver performs,” says Kentaro Berheit, a doctoral candidate in the Department of Mechanical Engineering at the Massachusetts Institute of Technology. “This kind of robot helps reduce the burden on caregivers and is gentler and more comfortable for patients.”
Barhydt, along with co-lead author O. Godson Osele and colleagues from Stanford University; Publish your new robot design in Science Advances. Co-authors of the study include Harry Asada, a professor at the Ford School of Engineering at the Massachusetts Institute of Technology, Alison Okamura, a professor in the Richard W. Wayland School of Engineering at Stanford University, Sreela Kodali and Cosmia du Pasquier at Stanford University, and Chase Hartquist, a former MIT graduate student now at the University of Florida in Gainesville.
open and closed state
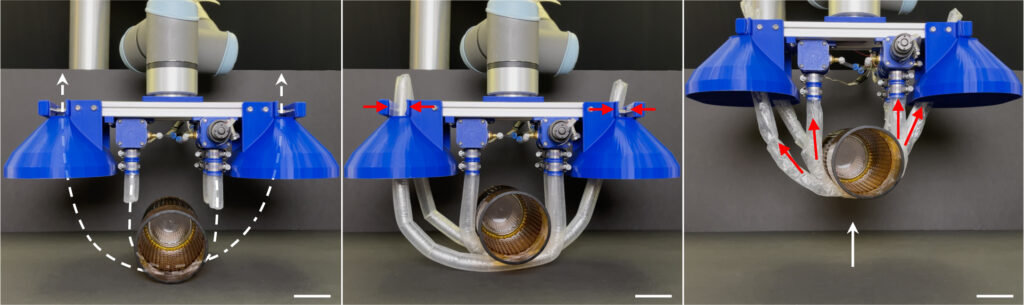 As it stretches, the vine twists around the object and continues back towards the box. There it automatically clamps into place and mechanically unwinds, gently lifting the object with a soft sling-like grip. Image credit: Provided by researcher.
As it stretches, the vine twists around the object and continues back towards the box. There it automatically clamps into place and mechanically unwinds, gently lifting the object with a soft sling-like grip. Image credit: Provided by researcher.
Okamura and his colleagues at Stanford University have pioneered the development of a soft, vine-inspired robot that extends outward from its tip. These designs are primarily built with thin but sturdy pneumatic tubing that grows and expands with controlled air pressure. As they grow, the tubes may twist, bend, and snake their way through the environment, slipping through small, cluttered spaces.
Researchers have primarily studied vine robots for use in safety inspections and search and rescue operations. But Berheid and Asada, whose group at the Massachusetts Institute of Technology has developed assistive robots for the elderly, wondered whether such a vine-inspired robot could address certain challenges in elderly care, particularly lifting people safely out of bed. In nursing and rehabilitation settings, this transfer process is often performed using a patient lift operated by a caregiver, which requires first physically moving the patient onto their side and then returning them to a hammock-like seat. Caregivers can wrap the sheet around the patient, hook it to a mechanical lift, and gently lift the patient out of bed, similar to hanging a hammock or sling.
As an alternative, the MIT and Stanford team envisioned a vine-like robot that could gently snake under and around a patient to create its own sling, without caregivers having to physically manipulate the patient. But in order to lift the sling, the researchers realized they needed to add an element missing from existing vine robot designs. That essentially means you need to close the loop.
Most vine-inspired robots are designed as “open loop” systems. That is, it acts as an open-ended string that can be stretched and bent in various configurations, but it is not designed to be fixed to anything to form a closed loop. Barhydt speculated that if the vine robot could transform from an open loop to a closed loop, it could become a sling around objects and pull itself up, whatever or whoever it might hold onto.
For new research, Barhydt, Osele, and their colleagues outline the design of a new vine-inspired robotic gripper that combines both open-loop and closed-loop motion. In an open-loop configuration, the robot’s vines can grow and twist around objects to provide a firm grip. They may even burrow under people lying in bed. Once grabbed, the vine continues to grow toward its source and attaches to it, creating a closed loop that can be retracted to retrieve the object.
“People may think that to grab something, you just have to reach out and grab it,” Barheit said. “But there are different stages, such as positioning and holding. By converting between open-loop and closed-loop, each stage can take advantage of the benefits of both forms and achieve new levels of performance.”
gentle suspension
As a demonstration of new open-loop and closed-loop concepts, the team built a large-scale robotic system designed to safely lift a person out of bed. This system consists of a set of pressurized boxes attached to each end of an overhead bar. An air pump inside the box slowly inflates, unfurling a thin vine-like tube that extends toward the head and foot of the bed. You can control the air pressure to gently move the tubes under and around people, then return them to their respective boxes. Next, secure the vines to each box by threading them through the clamping mechanism. A winch winds the vine toward the box, slowly lifting the person in the process.
“Heavy and fragile objects like the human body are difficult to grasp with the robotic hands available today,” Asada says. “We have developed a vine-like robotic gripper that can wrap around objects and gently and safely suspend them.”
“We hope this study will inspire our colleagues to continue exploring,” says co-lead author Osele. “I particularly look forward to the impact on patient transport applications in healthcare.”
“I’m very excited about future research using robots like this for physical assistance for people with mobility difficulties,” adds co-author Okamura. “Soft robots are relatively safe, low cost, and can be optimally designed for specific human needs, in contrast to other approaches such as humanoid robots.”
Although the team’s design was motivated by challenges in elderly care, the researchers realized that the new design could also be applied to other grasping tasks. In addition to the larger system, we also built a smaller version that can be attached to a commercially available robotic arm. In this version, the team showed that the vine robot can grab and lift a variety of heavy and fragile objects, including a watermelon, a glass vase, a kettlebell, a bunch of metal bars, and a playground ball. The vines can also snake through cluttered trash cans to retrieve desired items.
“We think this kind of robot design can be adapted to many applications,” Barhydt says. “We are also thinking about applying it to heavy industry and automating crane operations at ports and warehouses.”
This research was supported in part by the National Science Foundation and the Ford Foundation.

Massachusetts Institute of Technology News